Fishbot架构介绍
硬件结构
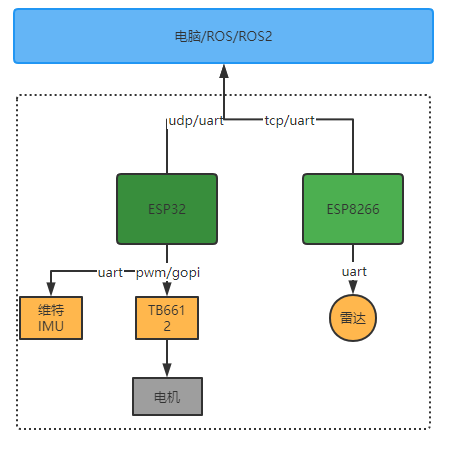
- 乐鑫ESP32作为主控
- IMU目前采用维特IMU
- TB6612 用于驱动电机
- 电机采用电磁编码器
- ESP8266主要用于驱动雷拉,代替传统意义树莓派
软件结构
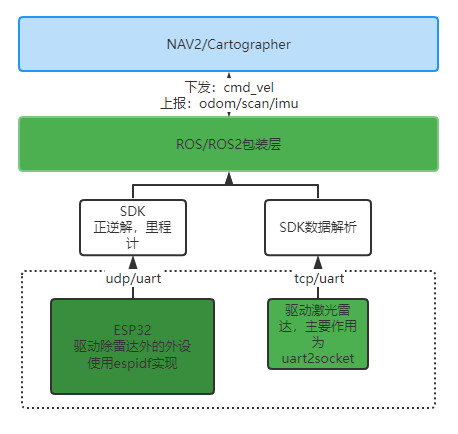
软件上一共四层
- 嵌入式采用espidf框架开发
- 激光雷达直接使用ESP8266进行数据转发
- SDK层不包含ROS/ROS2相关的所有控制支持
- Nav2和Cartographer用于导航和建图
主要工作
导航
| 序号 | 类别 | 主要内容 | 规模 | 负责人 | 目前状态 |
|---|
| 1 | Nav2 | 调节参数,根据目前地盘优化出一个稳定可用的Nav2参数 | 大型 | / | / |
| 2 | Nav | 结合ROS完成导航配置 | 大型 | / | / |
激光雷达
| 序号 | 类别 | 主要内容 | 规模 | 负责人 | 目前状态 |
|---|
| 3 | 硬件数据转接板(ESP8266) | 根据现有电路结构,绘制原理图与PCB | 小型 | / | / |
| 4 | 嵌入式 | ESP8266-优化雷达驱动(自动配网) | 小型 | / | / |
| 5 | SDKLaser | 激光雷达上位机SDK,优化雷达数据解析部分 | 小型 | / | / |
| 6 | SDKLaser+ROS/ROS2 | 利用SDKLaser来编写ROS/ROS2的驱动 | 小型 | / | / |
运动控制板
| 序号 | 类别 | 主要内容 | 规模 | 负责人 | 目前状态 |
|---|
| 7 | 硬件运动控制板(ESP32) | 根据现有电路结构,绘制原理图与PCB | 中型 | / | / |
| 8 | 嵌入式-运动控制程序 | ESP32-优化电机驱动与IMU驱动程序(自动配网) | 中型 | / | / |
| 10 | SDK+ROS/ROS2 | 利用SDK来编写ROS/ROS2的驱动 | 中型 | / | / |
结构设计
| 序号 | 类别 | 主要内容 | 规模 | 负责人 | 目前状态 |
|---|
| 11 | 进阶版结构设计 | 设计可以支撑电脑的可扩展结构 | 小型 | / | / |